Свободные колебания систем с конечным числом степеней свободы (общий случай)
Как уже говорилось (см. подразд. 1.4), дифференциальные уравнения движения таких систем можно получить тремя основными способами: 1) в форме уравнений Лагранжа; 2) прямым способом; 3) обратным способом.
Наиболее общий вид дифференциальных уравнений движения может быть получен в форме уравнений Лагранжа

где K и П - кинетическая и потенциальная энергии соответственно;



Известно, что при малых колебаниях около положения равновесия кинетическая и потенциальная энергии выражаются через обобщённые координаты и обобщённые скорости следующим образом:



где

Подставляя (30) в (29), получим систему однородных линейных дифференциальных уравнений с постоянными коэффициентами:


Однако составление уравнений движения по схеме Лагранжа не является обязательным, потому что во многих случаях прямой или обратный способы оказываются более удобными.
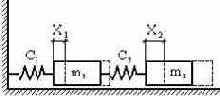
Рассмотрим особенности названных способов на примере системы с двумя степенями свободы, состоящей из тел с массами




За обобщённые координаты примем горизонтальные перемещения




Основной способ (уравнения Лагранжа)
Кинетическая энергия рассматриваемой системы:

Потенциальная энергия деформации пружин:

Вычислим производные, необходимые для подстановки в уравнения Лагранжа:






Подставляя вычисленные значения в (29), получим дифференциальные уравнения движения рассматриваемой системы

Прямой способ
Выделяем массы





Дифференциальные уравнения движения грузов имеют вид

Подставляя значения



т.е. эти уравнения совпали с уравнениями (32).
а б

в
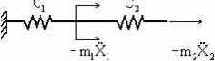
Рис. 22
